Elevation Mapping介绍
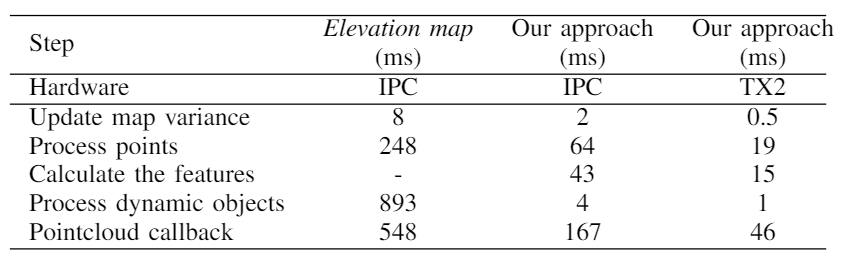
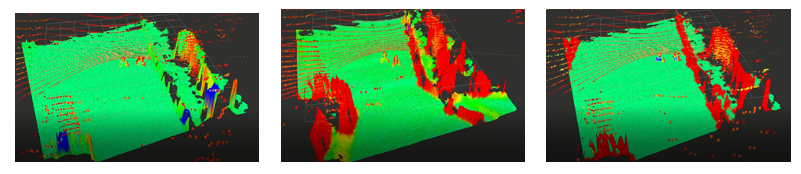
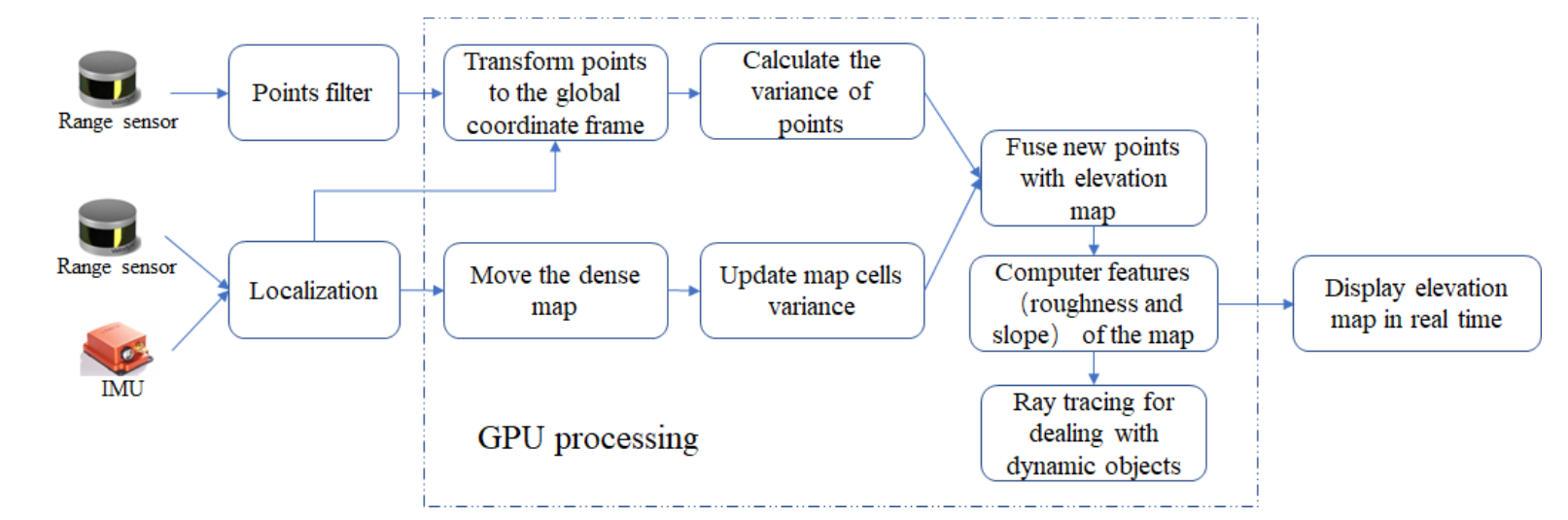
考虑到地面移动机器人移动时避障与导航的需求,基于ETHZ的Elevation map,提出了一种实时可扩展的GPU实现的Elevation map. 在整个原始Elevation map的框架中,将部分可并行部分进行cuda加速,此外实现了ray tracing算法进行了实时障碍物消除。原始几何数据的基础上进行了可行域分析,并添加了相应的地图层,为地面移动机器人避障与导航提供了较为便捷的地图。
Elevation 模块 - 地图融合
该建图模块接受前端定位的位姿输出。位姿信息用于更新局部地图原点与融合多帧点云。 其中包括多帧点云融合以及局部地图维护更新是在GPU中进行加速。
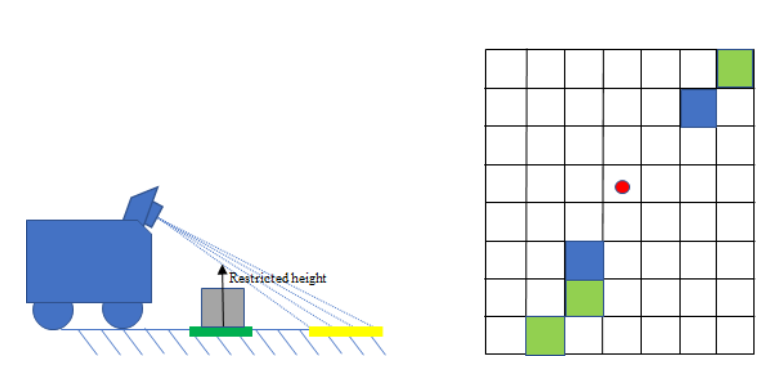
Elevation 模块 - Ray tracing
原始Elevation mapping由于并没有进行并行加速,因此实时性不好,从而会出现障碍物残影。在原始Elevation map上加入光线追踪方法,GPU加速的光线追踪方法可以实现实时的障碍物检测。
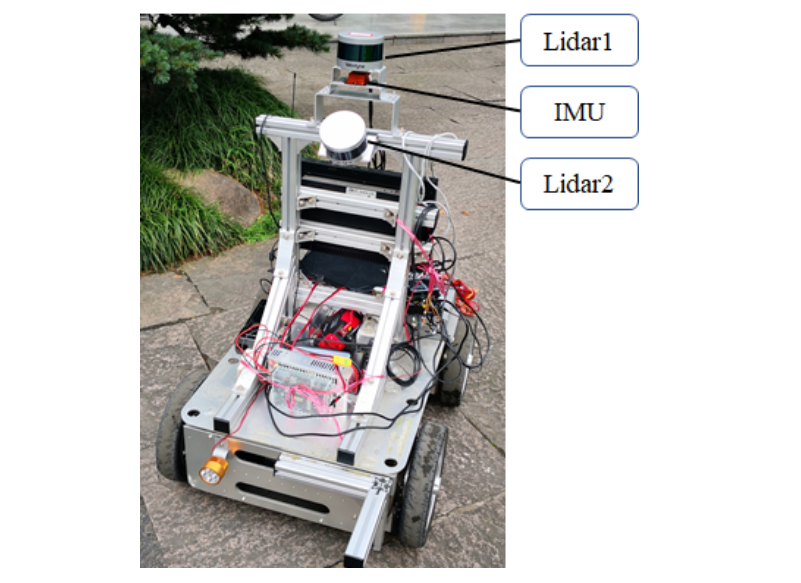
实验
实验平台如下,采用激光里程计。
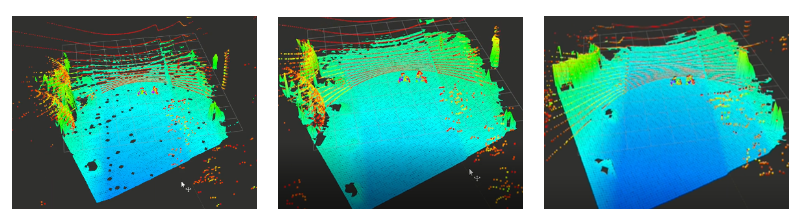
实验结果:
下图左图为原始Elevation map在PC上的效果,中间为GPU加速的方法在TX2上的效果,右图为GPU加速的方法在PC上的效果